OpenODC:自动驾驶运行边界公共证据平台
OPENODC: A PUBLIC EVIDENCE PLATFORM FOR AUTOMATED DRIVING ODC
张玉新
自动驾驶安全联合实验室
吉林大学汽车底盘集成与仿生全国重点实验室
2026年5月开场只讲一件事:自动驾驶系统的“能不能用”必须落到具体运行边界。OpenODC 试图把这些分散边界整理成公共证据表。
OPENODC: A PUBLIC EVIDENCE PLATFORM FOR AUTOMATED DRIVING ODC
自动驾驶安全联合实验室
吉林大学汽车底盘集成与仿生全国重点实验室
2026年5月开场只讲一件事:自动驾驶系统的“能不能用”必须落到具体运行边界。OpenODC 试图把这些分散边界整理成公共证据表。
目录页面向会议场景,只呈现正常的专业汇报结构。
进入第一部分,先把 ODC 从缩写拉回工程边界问题。
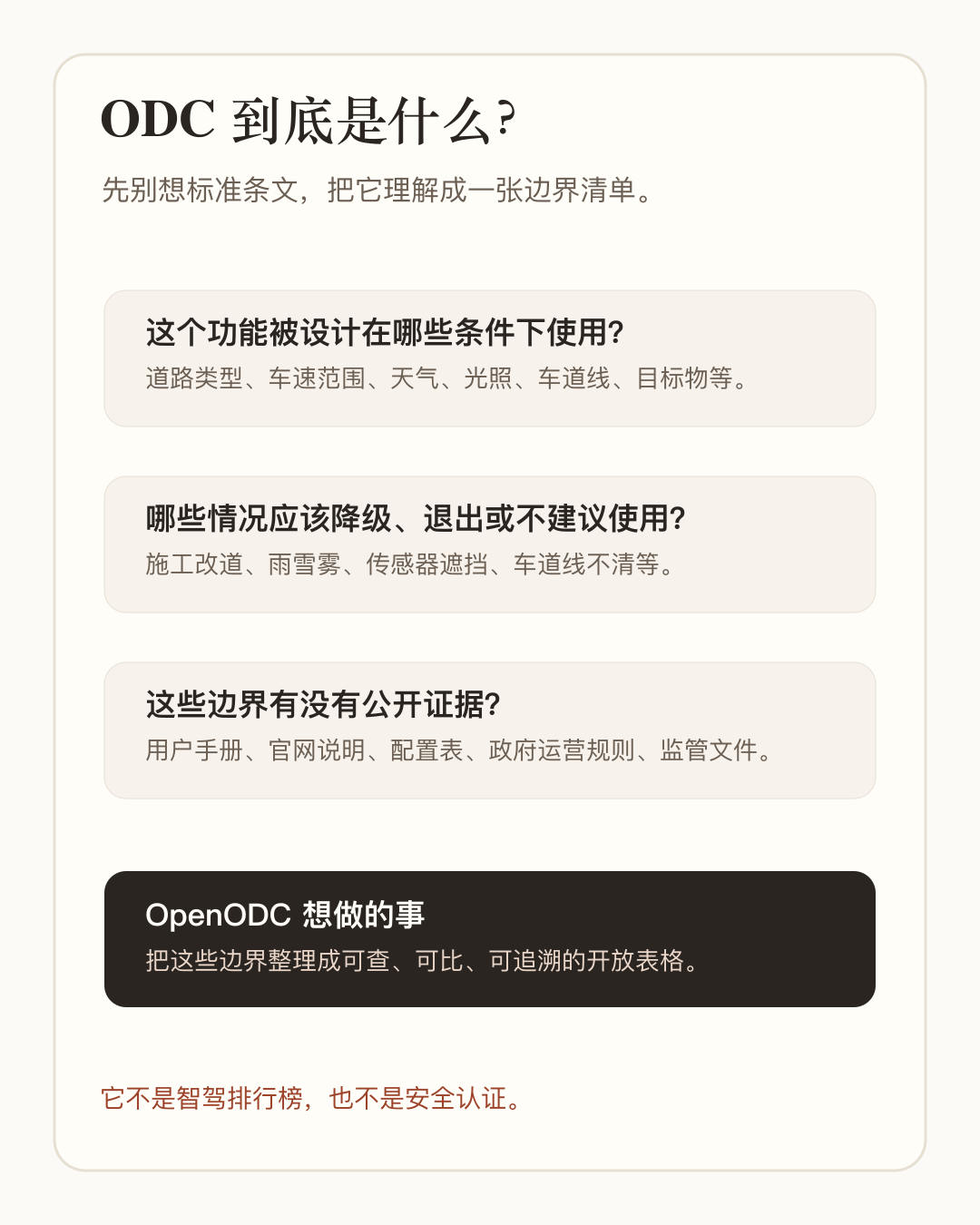
这一页先把 ODC 从抽象缩写拉回工程问题:公开资料到底有没有讲清楚系统边界。
这页防止听众把 OpenODC 误解为排行榜。等级和边界是两个维度。
进入第二部分,说明国标如何把 ODC 变成可对齐的元素体系。
这里讲标准价值:它不是给行业增加术语,而是让不同厂家、测试机构、监管和研究人员围绕同一张边界表沟通。
这页把 ODC 具体化。听众需要看到 OpenODC 不是写几条经验描述,而是承接完整国标元素体系。
这页是技术落点:OpenODC 的网页只是视图,真正可复用的是 ODCDocument 这个数据契约。
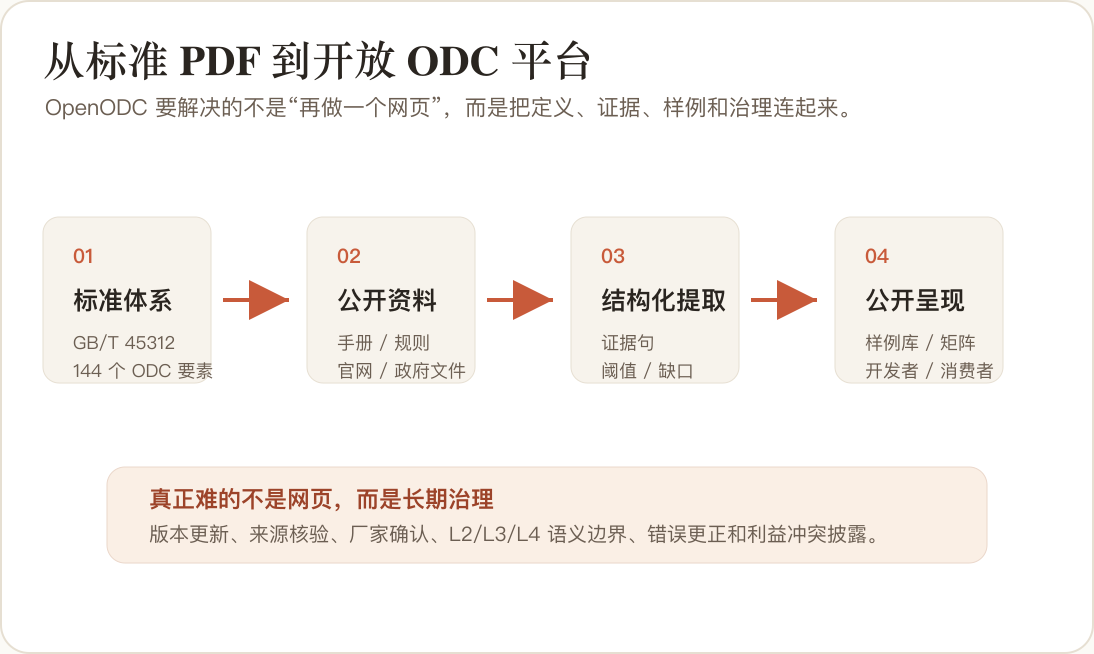
进入第三部分,从标准转向行业公共数据层缺口。
这里从标准转向平台:标准提供语法,但公开资料仍然需要整理、核验和持续维护。
正式场合必须讲清定位和边界,项目可信度来自克制。
进入第四部分,介绍 OpenODC 当前资产、方法论和组合边界设计。

这页开始让材料变实:不是只讲理念,而是给出项目当前已经形成的数据和页面资产。

样例覆盖辅助驾驶和无人驾驶运营,用同一套国标元素框架组织,适合现场快速展示项目不是空壳。
这里强调“覆盖率不是厂家披露率”。公开缺口必须可见,推定必须被标出来。
这页可以不用打开网站也能让听众理解横向矩阵的价值。
这一页说明 OpenODC 不只是结果展示,也包含从资料整理到审阅提交的流程设计。
这页总结 OpenODC 的工程原则。它是未来复用到其他项目的核心。
这是 OpenODC 相比普通 ODC 表格更有深度的地方,要讲透。
这一页要防止误读:组合边界是公共证据结构化,不是认证结论。

把公开资料中的 ODC 声明、证据来源和组合边界转成可审阅的数据结构。

用航测自然驾驶数据刻画边界条件在真实道路中的出现频次、参数分布和典型场景。
记录 L4 Robotaxi 运营异常、越界表现、远程干预和结果证据,反向提示高价值边界组合。
这页把 OpenODC 放到更大的自动驾驶安全工具栈中,说明它为什么有复利价值。
进入第五部分,收束到共建入口和行动建议。
这页只保留一次“怎么参与”,作为理解后的行动入口。
感谢页只做收束和联系方式,不重复共建路径。
